



���������о��ˆT�������ҕ�Xģ�͏����W��Ӗ����һ����һ�ӵ��C�������܉�ͨ�^�Լ���̽������ɸ��N�΄գ�������ߡ��B�·�����ʰ�;�……
���ң��@��һ����ܙC���˵�Ӗ���^���ǟo�O���ģ�����ҪͶι��������ȫ�ǙC��������������W���ġ�
Ҳ�����f���@���C���˿��˿����s�y�ķ��g������������ʰ��������
����сy�ŵ��O�����M�P�ӣ�

����B�����£�

������ߣ�

�ף����������`�롣
����@һϵ�й����ģ�����ͬһ���㷨��
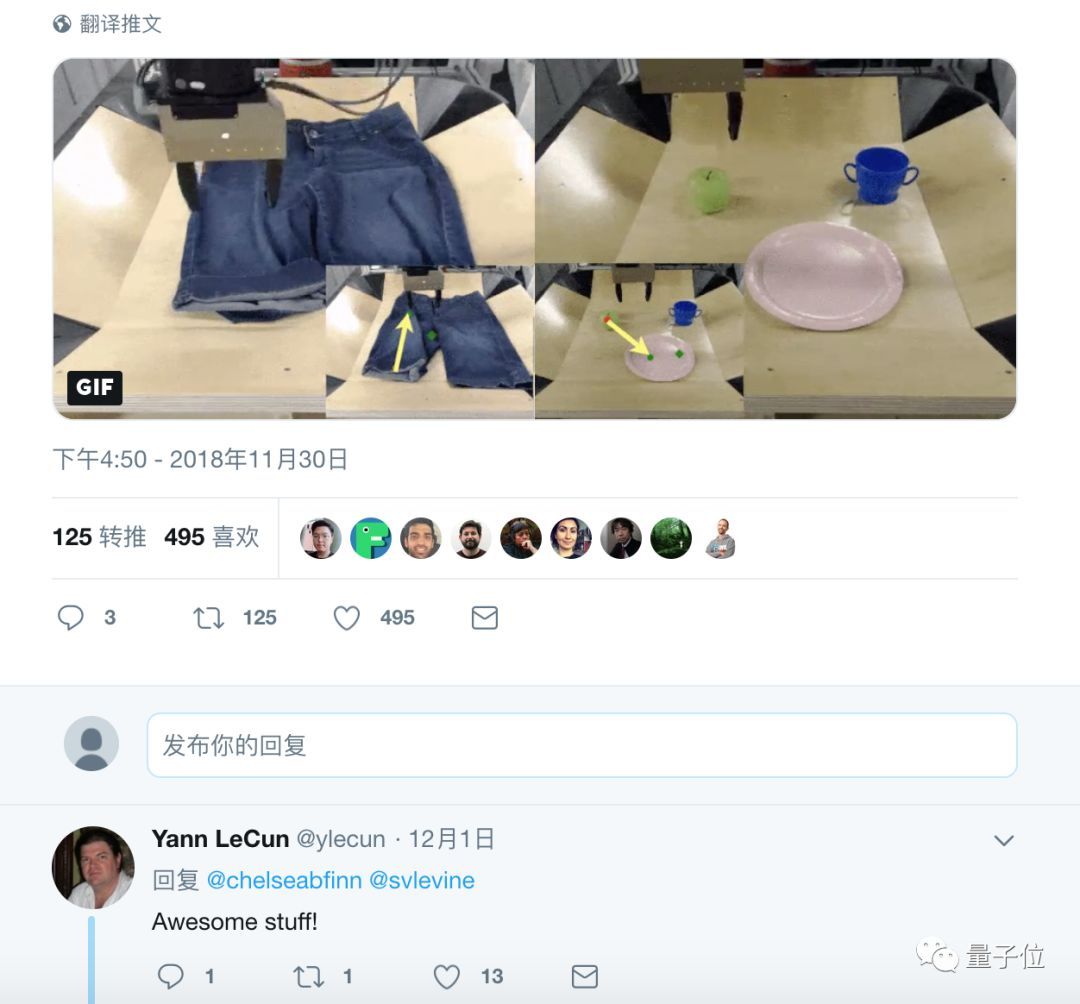
�@Щ����ļ��ܣ�Yann LeCun�������@����Awesome��
��С����һ����������
�҂��_�^�f�^���@���C���˲���Ҫ�˞�Ͷι������
��ô�������ă����أ�����Ҫ�������ĬF���������
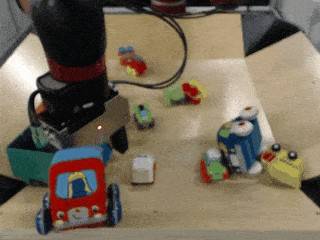
��һ���[���˸��N���w��“���g”�ȣ������C�����������������ܷ��g���һ�У��ڟo�O������r�£��C������ȫ�����Լ����Լ��ġ�
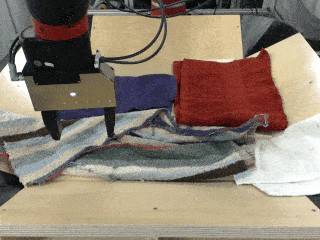
�����汭�ӡ�����@ЩӲ�Ė|����߀������“ܛ�w”��ë����
����^���У��C���˾�ͨ�^���N��������KUKA�C����ʾ�����S�����W����ҕ�X������֪���Լ���߅��ʲô�|����
�W���˶�λ������֪���Լ�����ʲô��
�W��������ͬ�Ą�����֪���Լ��l����ͬ������ֱە���ʲô��
�W���쾚ʹ���Լ���“��”�������A�y������ʲô���������h���е����w�a�����ӵ�Ӱ푡�
����̽���^�̛]�з֔������Oݔ�A����ȫ�ǙC�����Լ��{��“������”��ͨ�^�����@�����g�����Ʒ���γ��Լ���һ��“�����^”���^�̡�
�ɻ���У����������ô��
���C�����ѽ����h���е����w����ָ��֮���҂�ԓ��ô�o�����Ź����أ�
�������c��
�������h���У�ͨ�^�����c�o�C���˘�ע�΄�Ŀ�ˣ��tɫ����ʼ�c���Gɫ��Y���c��Ҳ���Ǹ��V�C���˰Ѽt�cλ�õĖ|���ᵽ�G�cλ�á�
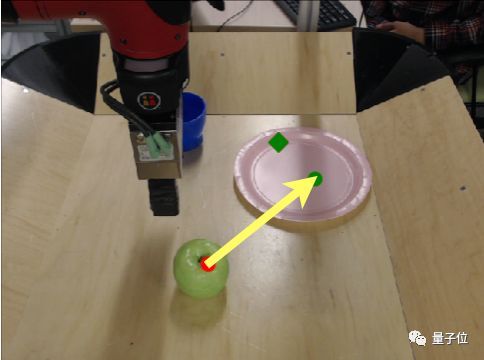
�C���ˣ�����Ѽt�cλ�õ��O����Ų���G�cλ�õıP����ȥ��
�C���������룬���ֻҪ���O���A���������ֱ�Ų�^ȥ�����O�����£��Ϳ����˰ѣ�

���C���˃��ĵ�“�ݸ�”
�Ǿ��@ô�k�ˣ��ن��Cе�ۣ�www.tka.net.cn����������R���҂�Ųһ��������
Bingo���ɹ���
��һ���΄գ��҂���ţ�П�ѝ�B������

��һ�룬��סһ���ǣ�Ų�^���ͺ��˰ɣ�

�����@��Ӌ��ԇһԇ��

�����ɹ�~
�@���^�̾��w�����ӵ��أ��������ٷ��o����һ��ҕ�l�����Դ��_�W��һ�£�
�����T
������������T��
Փ�ģ�
Visual Foresight: Model-Based Deep Reinforcement Learning for Vision-Based Robotic Control
Frederik Ebert, Chelsea Finn, Sudeep Dasari, Annie Xie, Alex Lee, Sergey Levine
https://drive.google.com/file/d/1scfbONOHg8H2_pJ9naRkHfk4dGSNGNWO/view
���ͣ�
Visual Model-Based Reinforcement Learning as a Path towards Generalist Robots
https://bair.berkeley.edu/blog/2018/11/30/visual-rl/
��www.tka.net.cn